Specifcations:
Tortoise manipulator
Weigh: 95 kg
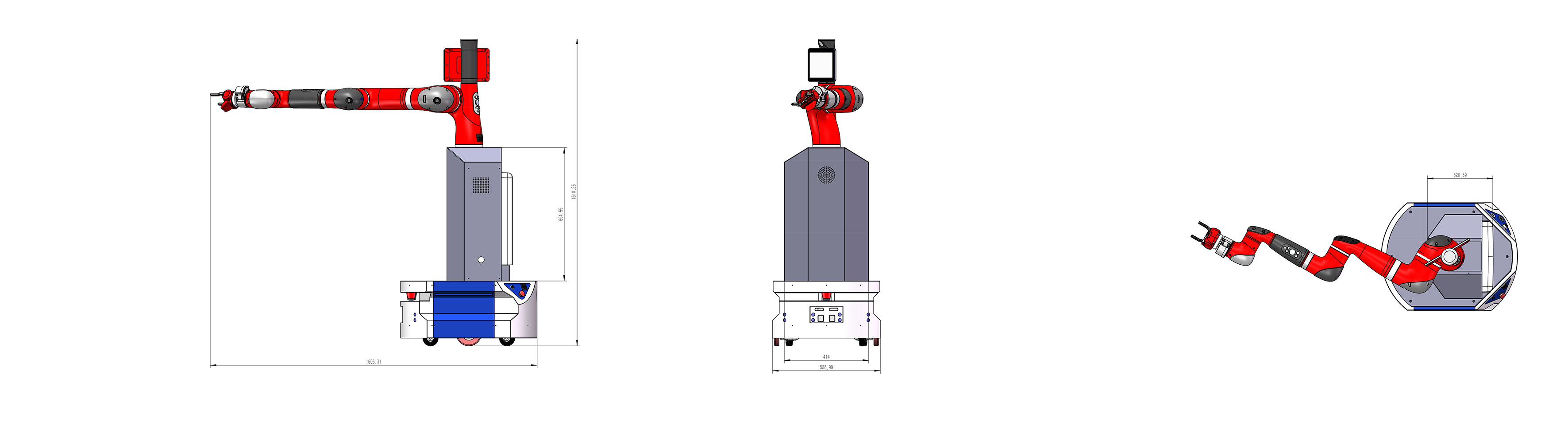
Height: 1250mm
Max speed: 1.5m/s
Degrees of freedom: 10 (base, 6-DOF arm, gripper and head)
Environment: indoors
7-DOF arm
Payload: 4kg
Maximum Reach: 1260mm
Tortoise manipulator: 0.1mm
Rating: IP54
Sensors
2D laser: 10m, 270 degress
3D RGB-D: Realsense
IMU: 6-DOF IMU
Gripper
Max grip force: 22.5N
Maximum recommended payload: 2.3kg
Gripper opening (see figure): 0 to 90 mm
Computer
Processor: Intel i7
RAM: 8GB
Hard drive: 128GB SSD
Speaker : Stereo speaker
Extensibility
Video port: HD video port
Other ports: 1x USB, 1x Ethernet
Installed software
Ubuntu Linux LTS, ROS
Installed applications
ROS Navigation, MoveIt!,
joystick teleop,
Tortoise manipulator combines the robot Tortoise(IR-C100 Research vision) with Rethink sawyer robot arm. Tortoise is an excellent compact indoor mobile robot which can autonomous navigation in door based on SLAM, no need guides, infrastructure, or predefined paths.
The Tortoise have been mounted with a wide range of lasers which have 10 meters operational range.In addition, it includes an RGBD sensor and 4 pc sonars on the front of base, which can be used to obstacles avoidance.
the sawyer arm is a 7DOF high quality industrial collaborative robot and a electric gripper that can handle payloads up to 4Kg. Which also equipped with an embedded vision system – a Cognex camera in its wrist. with force sensing, you can control force for applications where delicate part insertion is critical, or use force feedback .
The software includes a control system, a tracking system (laser-based), a navigation system the location, navigation, pick and place components are standard packages. Based on open-source and modular, ROS and moveit framework simplifies the software development and allows easy integration and reutilization of software components whether they are device drivers or state of the art algorithms in vision, SLAM, point cloud processing, grasping,