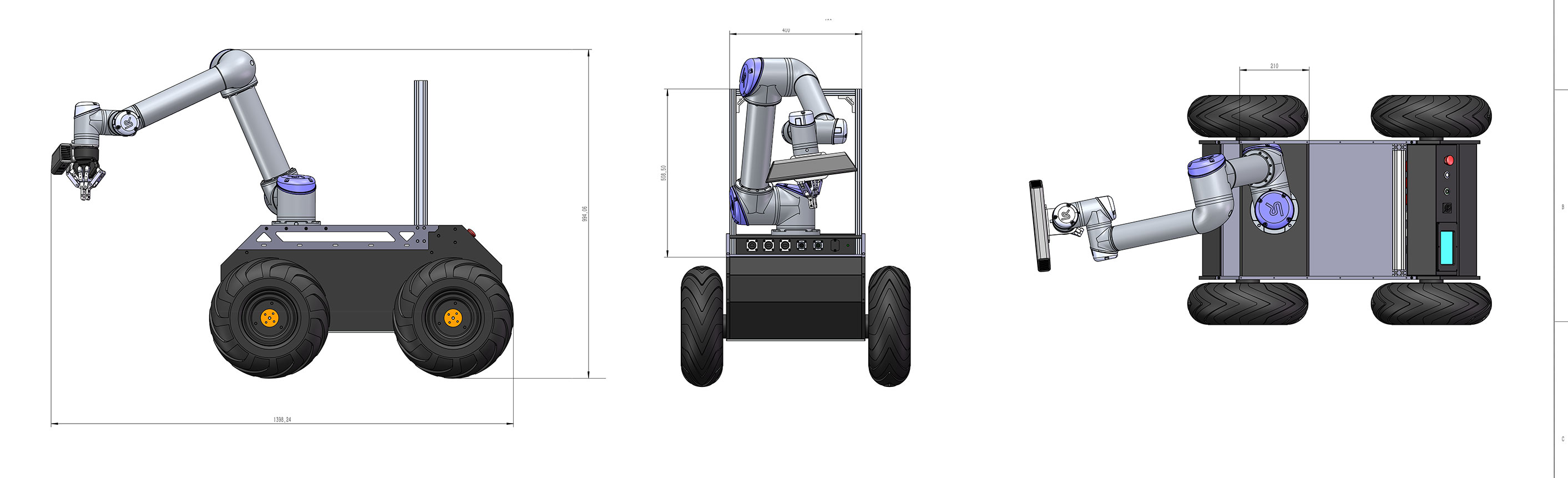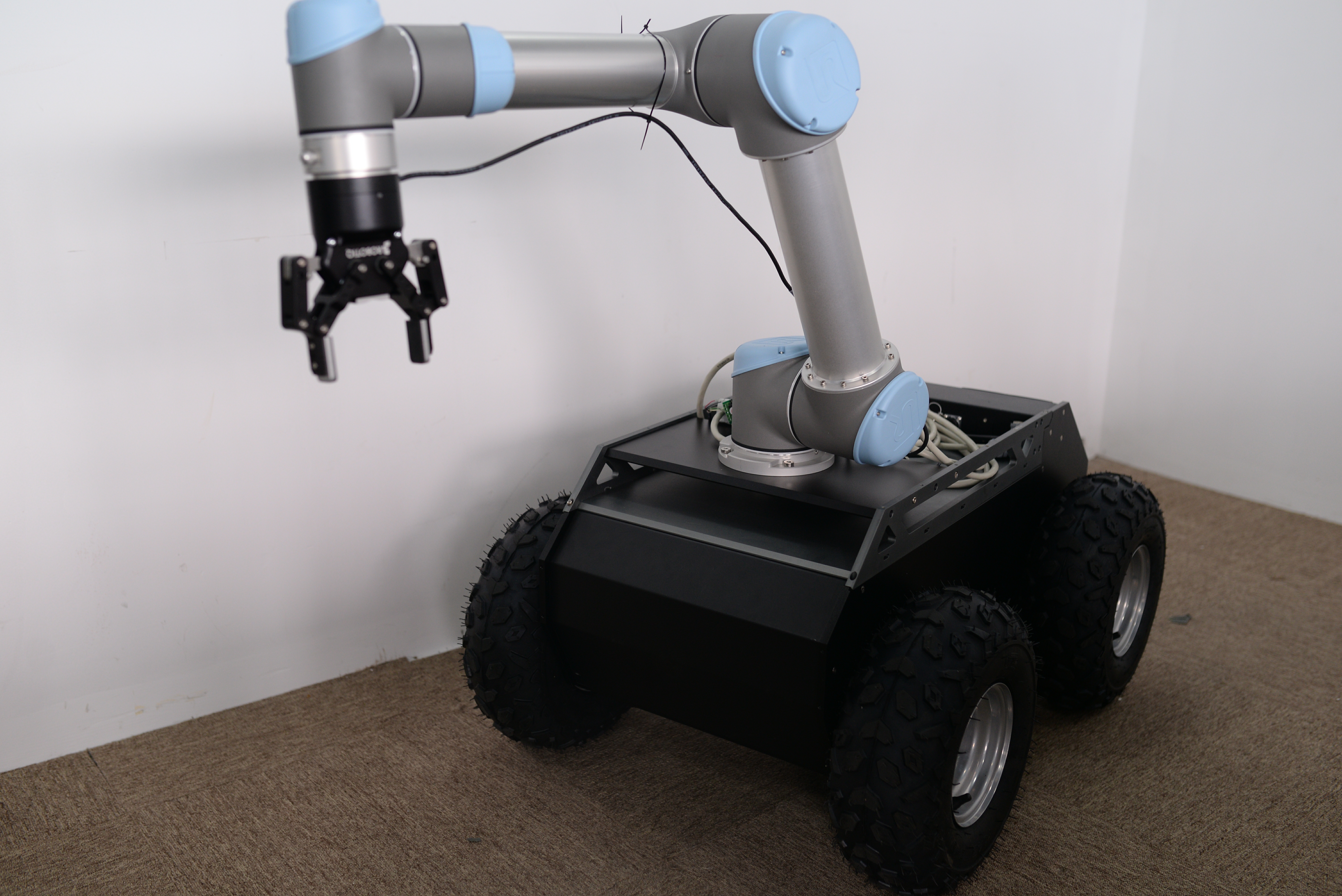
Bulldog manipulator combines the robot Bulldog with a light-weight robot arm UR5, robotiq gripper 85. we can provide two approach for integration, one is used UR owner control box, which can used their original control software and manual control unit, the other is used some control board from UR control box, the robot will more compact.
The Modular design and provide 5/12/24/48vpower and reconfigurable I/O. make the robot easy to integrate serveral sensors (indoor/outdoor laser, cameras, 3D cameras, inertial measurement units, GPS …). the robot can be teleoperated, follow the leader or use GPS waypoint navigation in harsh, hazardous or research environments.
Based on open-source and modular, ROS (http://www.ros.org).framework simplifies the software development and allows easy integration and reutilization of software components whether they are device drivers or state of the art algorithms in vision, SLAM, point cloud processing, grasping, planning, swarming, etc.
Specifcations:
Bulldog Manipulate
Weigh: 85 kg
Height: 1300mm
Max speed: 2m/s
Degrees of freedom: 9 (base, 6-DOF arm and gripper)
Environment: outdoors
6-DOF arm
Payload: 5kg
Maximum Reach: 850mm
Max end effector speed: 1m/s
Rating: IP54
Sensors
2D laser: 50m, 270 degress
3D RGB-D: Kinect1.0 or Realsense
IMU: 6-DOF IMU
Gripper
Grip force: 60 to 200 N
Maximum recommended payload: 5kg
Gripper opening (see figure): 0 to 85 mm
Closing speed: 20 to150 mm/s
Computer
Processor: Intel i7
RAM: 8GB
Hard drive: 128GB SSD
Speaker : Stereo speaker
Extensibility
Video port: HD video port
Other ports: 1x USB, 1x Ethernet
Installed software
Ubuntu Linux LTS, ROS
Installed applications
ROS Navigation, MoveIt!,
joystick teleop